harmony 鸿蒙SPI
SPI
概述
功能简介
SPI指串行外设接口(Serial Peripheral Interface),是一种高速的,全双工,同步的通信总线。SPI是由Motorola公司开发,用于在主设备和从设备之间进行通信。
SPI接口定义了操作SPI设备的通用方法集合,包括:
SPI设备句柄获取和释放。
SPI读写:从SPI设备读取或写入指定长度数据。
SPI自定义传输:通过消息传输结构体执行任意读写组合过程。
SPI设备配置:获取和设置SPI设备属性。
运作机制
在HDF框架中,SPI的接口适配模式采用独立服务模式,在这种模式下,每一个设备对象会独立发布一个设备服务来处理外部访问,设备管理器收到API的访问请求之后,通过提取该请求的参数,达到调用实际设备对象的相应内部方法的目的。独立服务模式可以直接借助HDFDeviceManager的服务管理能力,但需要为每个设备单独配置设备节点,若设备过多可能增加内存占用。
独立服务模式下,核心层不会统一发布一个服务供上层使用,因此这种模式下驱动要为每个控制器发布一个服务,具体表现为:
驱动适配者需要实现HdfDriverEntry的Bind钩子函数以绑定服务。
device_info.hcs文件中deviceNode的policy字段为1或2,不能为0。
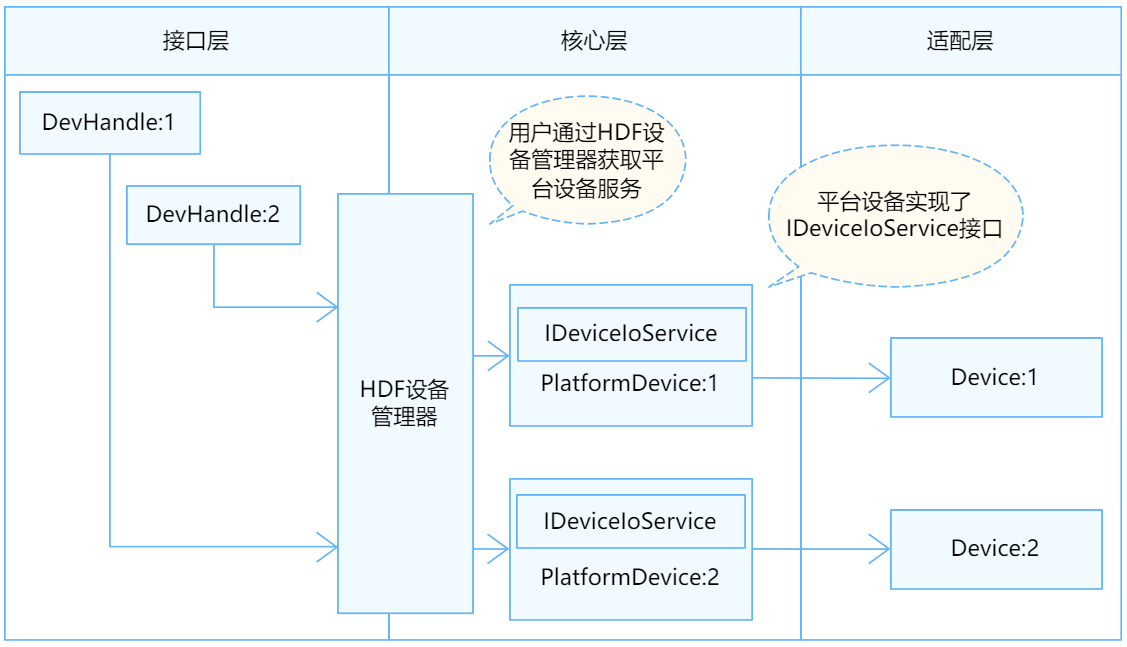
SPI模块各分层作用:
接口层提供打开SPI设备、SPI写数据、SPI读数据、SPI传输、配置SPI设备属性、获取SPI设备属性、关闭SPI设备的接口。
核心层主要提供SPI控制器的添加、移除以及管理的能力,通过钩子函数与适配层交互。
适配层主要是将钩子函数的功能实例化,实现具体的功能。
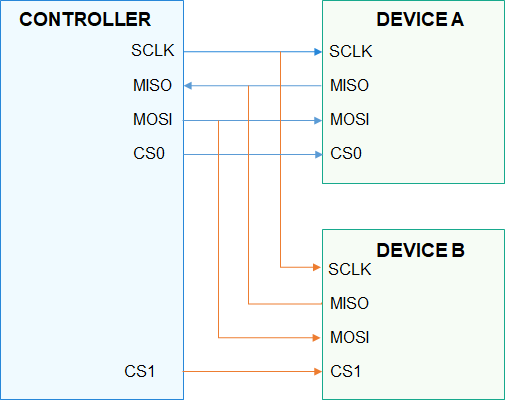
SPI以主从方式工作,通常有一个主设备和一个或者多个从设备。主设备和从设备之间一般用4根线相连,它们分别是:
SCLK:时钟信号,由主设备产生;
MOSI:主设备数据输出,从设备数据输入;
MISO:主设备数据输入,从设备数据输出;
CS:片选,从设备使能信号,由主设备控制。
一个主设备和两个从设备的连接示意图如图2所示,Device A和Device B共享主设备的SCLK、MISO和MOSI三根引脚,Device A的片选CS0连接主设备的CS0,Device B的片选CS1连接主设备的CS1。
图 2 SPI主从设备连接示意图
SPI通信通常由主设备发起,通过以下步骤完成一次通信:
通过CS选中要通信的从设备,在任意时刻,一个主设备上最多只能有一个从设备被选中。
通过SCLK给选中的从设备提供时钟信号。
基于SCLK时钟信号,主设备数据通过MOSI发送给从设备,同时通过MISO接收从设备发送的数据,完成通信。
根据SCLK时钟信号的CPOL(Clock Polarity,时钟极性)和CPHA(Clock Phase,时钟相位)的不同组合,SPI有以下四种工作模式:
CPOL=0,CPHA=0 时钟信号idle状态为低电平,第一个时钟边沿采样数据。
CPOL=0,CPHA=1 时钟信号idle状态为低电平,第二个时钟边沿采样数据。
CPOL=1,CPHA=0 时钟信号idle状态为高电平,第一个时钟边沿采样数据。
CPOL=1,CPHA=1 时钟信号idle状态为高电平,第二个时钟边沿采样数据。
约束与限制
SPI模块当前只支持主机模式,不支持从机模式。
使用指导
场景介绍
SPI通常用于与闪存、实时时钟、传感器以及模数/数模转换器等支持SPI协议的设备进行通信。
接口说明
SPI模块提供的主要接口如表1所示,具体API详见。
表 1 SPI驱动API接口功能介绍
| 接口名 | 接口描述 |
|---|---|
| DevHandle SpiOpen(const struct SpiDevInfo *info) | 获取SPI设备句柄 |
| void SpiClose(DevHandle handle) | 释放SPI设备句柄 |
| int32_t SpiRead(DevHandle handle, uint8_t *buf, uint32_t len) | 读取指定长度的数据 |
| int32_t SpiWrite(DevHandle handle, uint8_t *buf, uint32_t len) | 写入指定长度的数据 |
| int32_t SpiTransfer(DevHandle handle, struct SpiMsg *msgs, uint32_t count) | SPI数据传输接口 |
| int32_t SpiSetCfg(DevHandle handle, struct SpiCfg *cfg) | 根据指定参数,配置SPI设备 |
| int32_t SpiGetCfg(DevHandle handle, struct SpiCfg *cfg) | 获取SPI设备配置参数 |
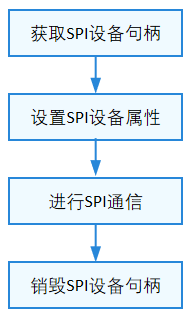
使用流程
使用SPI的一般流程如下图所示。
图 3 SPI使用流程图
获取SPI设备句柄
在使用SPI进行通信时,首先要调用SpiOpen获取SPI设备句柄,该函数会返回指定总线号和片选号的SPI设备句柄。
DevHandle SpiOpen(const struct SpiDevInfo *info);
表 2 SpiOpen参数和返回值描述
| 参数 | 参数描述 |
|---|---|
| info | 结构体类型,SPI设备描述符 |
| 返回值 | 返回值描述 |
| NULL | 获取SPI设备句柄失败 |
| 设备句柄 | 获取对应的SPI设备句柄成功 |
假设系统中的SPI设备总线号为0,片选号为0,获取该SPI设备句柄的示例如下:
struct SpiDevInfo spiDevinfo; // SPI设备描述符
DevHandle spiHandle = NULL; // SPI设备句柄
spiDevinfo.busNum = 0; // SPI设备总线号
spiDevinfo.csNum = 0; // SPI设备片选号
// 获取SPI设备句柄
spiHandle = SpiOpen(&spiDevinfo);
if (spiHandle == NULL) {
HDF_LOGE("SpiOpen: spi open fail!\n");
return HDF_FAILURE;
}
获取SPI设备属性
在获取到SPI设备句柄之后,需要配置SPI设备属性。配置SPI设备属性之前,可以先获取SPI设备属性,获取SPI设备属性的函数如下所示:
int32_t SpiGetCfg(DevHandle handle, struct SpiCfg *cfg);
表 3 SpiGetCfg参数和返回值描述
| 参数 | 参数描述 |
|---|---|
| handle | DevHandle类型,SPI设备句柄 |
| cfg | 结构体指针类型,SPI设备配置参数 |
| 返回值 | 返回值描述 |
| HDF_SUCCESS | 获取设备属性成功 |
| 负数 | 获取设备属性失败 |
int32_t ret;
struct SpiCfg cfg = {0}; // SPI配置信息
ret = SpiGetCfg(spiHandle, &cfg); // 获取SPI设备属性
if (ret != HDF_SUCCESS) {
HDF_LOGE("SpiGetCfg: failed, ret %d\n", ret);
return ret;
}
配置SPI设备属性
在获取到SPI设备句柄之后,需要配置SPI设备属性,配置SPI设备属性的函数如下所示:
int32_t SpiSetCfg(DevHandle handle, struct SpiCfg *cfg);
表 4 SpiSetCfg参数和返回值描述
| 参数 | 参数描述 |
|---|---|
| handle | DevHandle类型,SPI设备句柄 |
| cfg | 结构体指针类型,SPI设备配置参数 |
| 返回值 | 返回值描述 |
| HDF_SUCCESS | 配置设备属性成功 |
| 负数 | 配置设备属性失败 |
int32_t ret;
struct SpiCfg cfg = {0}; // SPI配置信息
cfg.mode = SPI_MODE_LOOP; // 以回环模式进行通信
cfg.transferMode = PAL_SPI_POLLING_TRANSFER; // 以轮询的方式进行通信
cfg.maxSpeedHz = 115200; // 最大传输频率
cfg.bitsPerWord = 8; // 读写位宽为8比特
ret = SpiSetCfg(spiHandle, &cfg); // 配置SPI设备属性
if (ret != HDF_SUCCESS) {
HDF_LOGE("SpiSetCfg: failed, ret %d\n", ret);
return ret;
}
进行SPI通信
向SPI设备写入指定长度的数据
如果只向SPI设备写一次数据,则可以通过以下函数完成:
int32_t SpiWrite(DevHandle handle, uint8_t *buf, uint32_t len);表 5 SpiWrite参数和返回值描述
|参数|参数描述| |——–|——–| |handle|DevHandle类型,SPI设备句柄| |buf|uint8_t类型指针,待写入数据| |len|uint32_t类型,待写入的数据长度| |返回值|返回值描述| |HDF_SUCCESS|写入成功| |负数|写入失败|
```c
int32_t ret;
uint8_t wbuff[4] = {0x12, 0x34, 0x56, 0x78};
// 向SPI设备写入指定长度的数据
ret = SpiWrite(spiHandle, wbuff, 4);
if (ret != HDF_SUCCESS) {
HDF_LOGE("SpiWrite: failed, ret %d\n", ret);
return ret;
}
```
从SPI设备读取指定长度的数据
如果只读取一次数据,则可以通过以下函数完成:
int32_t SpiRead(DevHandle handle, uint8_t *buf, uint32_t len);表 6 SpiRead参数和返回值描述
|参数|参数描述| |——–|——–| |handle|DevHandle类型,SPI设备句柄| |buf|uint8_t类型指针,待读取数据| |len|uint32_t类型,待读取的数据长度| |返回值|返回值描述| |HDF_SUCCESS|读取成功| |负数|读取失败|
```c
int32_t ret;
uint8_t rbuff[4] = {0};
// 从SPI设备读取指定长度的数据
ret = SpiRead(spiHandle, rbuff, 4);
if (ret != HDF_SUCCESS) {
HDF_LOGE("SpiRead: failed, ret %d\n", ret);
return ret;
}
```
自定义传输
如果需要发起一次自定义传输,则可以通过以下函数完成:
int32_t SpiTransfer(DevHandle handle, struct SpiMsg *msgs, uint32_t count);表 7 SpiTransfer参数和返回值描述
|参数|参数描述| |——–|——–| |handle|DevHandle类型,SPI设备句柄| |msgs|结构体指针,待传输数据的数组| |count|uint32_t类型,msgs数组长度| |返回值|返回值描述| |HDF_SUCCESS|传输执行成功| |负数|传输执行失败|
```c
int32_t ret;
uint8_t wbuff[1] = {0x12};
uint8_t rbuff[1] = {0};
struct SpiMsg msg; // 自定义传输的消息
msg.wbuf = wbuff; // 写入的数据
msg.rbuf = rbuff; // 读取的数据
msg.len = 1; // 读取、写入数据的长度都是1
msg.csChange = 1; // 进行下一次传输前关闭片选
msg.delayUs = 0; // 进行下一次传输前不进行延时
msg.speed = 115200; // 本次传输的速度
// 进行一次自定义传输,传输的msg个数为1
ret = SpiTransfer(spiHandle, &msg, 1);
if (ret != HDF_SUCCESS) {
HDF_LOGE("SpiTransfer: failed, ret %d\n", ret);
return ret;
}
```
销毁SPI设备句柄
SPI通信完成之后,需要销毁SPI设备句柄,销毁SPI设备句柄的函数如下所示:
void SpiClose(DevHandle handle);
该函数会释放掉申请的资源。
表 8 SpiClose参数描述
| 参数 | 参数描述 |
|---|---|
| handle | DevHandle类型,SPI设备句柄 |
SpiClose(spiHandle); // 销毁SPI设备句柄
使用实例
本例拟对Hi3516DV300开发板上SPI设备进行操作。
SPI设备完整的使用示例如下所示,首先获取SPI设备句柄,然后配置SPI设备属性,接着调用读写接口进行数据传输,最后销毁SPI设备句柄。
#include "hdf_log.h"
#include "spi_if.h"
void SpiTestSample(void)
{
int32_t ret;
struct SpiCfg cfg; // SPI配置信息
struct SpiDevInfo spiDevinfo; // SPI设备描述符
DevHandle spiHandle = NULL; // SPI设备句柄
struct SpiMsg msg; // 自定义传输的消息
uint8_t rbuff[4] = { 0 };
uint8_t wbuff[4] = { 0x12, 0x34, 0x56, 0x78 };
uint8_t wbuff2[4] = { 0xa1, 0xb2, 0xc3, 0xd4 };
spiDevinfo.busNum = 0; // SPI设备总线号
spiDevinfo.csNum = 0; // SPI设备片选号
spiHandle = SpiOpen(&spiDevinfo); // 根据spiDevinfo获取SPI设备句柄
if (spiHandle == NULL) {
HDF_LOGE("SpiTestSample: spi open fail!\n");
return;
}
// 获取SPI设备属性
ret = SpiGetCfg(spiHandle, &cfg);
if (ret != HDF_SUCCESS) {
HDF_LOGE("SpiTestSample: spi get cfg fail, ret:%d!\n", ret);
goto err;
}
cfg.maxSpeedHz = 115200; // 将最大时钟频率改为115200
cfg.bitsPerWord = 8; // 传输位宽改为8比特
// 配置SPI设备属性
ret = SpiSetCfg(spiHandle, &cfg);
if (ret != HDF_SUCCESS) {
HDF_LOGE("SpiTestSample: spi set cfg fail, ret:%d!\n", ret);
goto err;
}
/* 向SPI设备写入指定长度的数据 */
ret = SpiWrite(spiHandle, wbuff, 4);
if (ret != HDF_SUCCESS) {
HDF_LOGE("SpiTestSample: spi write fail, ret:%d!\n", ret);
goto err;
}
/* 从SPI设备读取指定长度的数据 */
ret = SpiRead(spiHandle, rbuff, 4);
if (ret != HDF_SUCCESS) {
HDF_LOGE("SpiTestSample: spi read fail, ret:%d!\n", ret);
goto err;
}
msg.wbuf = wbuff2; // 写入的数据
msg.rbuf = rbuff; // 读取的数据
msg.len = 4; // 读取写入数据的长度为4
msg.keepCs = 0; // 当前传输完成后是否保持CS活动,1表述保持,0表示关闭CS
msg.delayUs = 0; // 进行下一次传输前不进行延时
msg.speed = 115200; // 本次传输的速度
// 进行一次自定义传输,传输的msg个数为1
ret = SpiTransfer(spiHandle, &msg, 1);
if (ret != HDF_SUCCESS) {
HDF_LOGE("SpiTestSample: spi transfer fail, ret:%d!\n", ret);
goto err;
}
HDF_LOGD("SpiTestSample: function tests end!");
err:
// 销毁SPI设备句柄
SpiClose(spiHandle);
}
你可能感兴趣的鸿蒙文章
热门推荐
-
2、 优质文章
-
3、 gt
-
7、 openharmony
-
9、 golang
-
10、 Vue中input框自动聚焦