harmony 鸿蒙Watchdog
Watchdog
概述
功能简介
看门狗(Watchdog),又称看门狗计时器(Watchdog timer),是一种硬件计时设备。一般有一个输入、一个输出,输入叫做喂狗,输出连接到系统的复位端。当系统主程序发生错误导致未及时清除看门狗计时器的计时值时,看门狗计时器就会对系统发出复位信号,使系统从悬停状态恢复到正常运作状态。
基本概念
系统正常工作的时候,每隔一段时间输出一个信号到喂狗端,给看门狗清零,这个操作就叫做喂狗。如果超过规定的时间不喂狗,看门狗定时超时,就会给出一个复位信号到系统,使系统复位。
运作机制
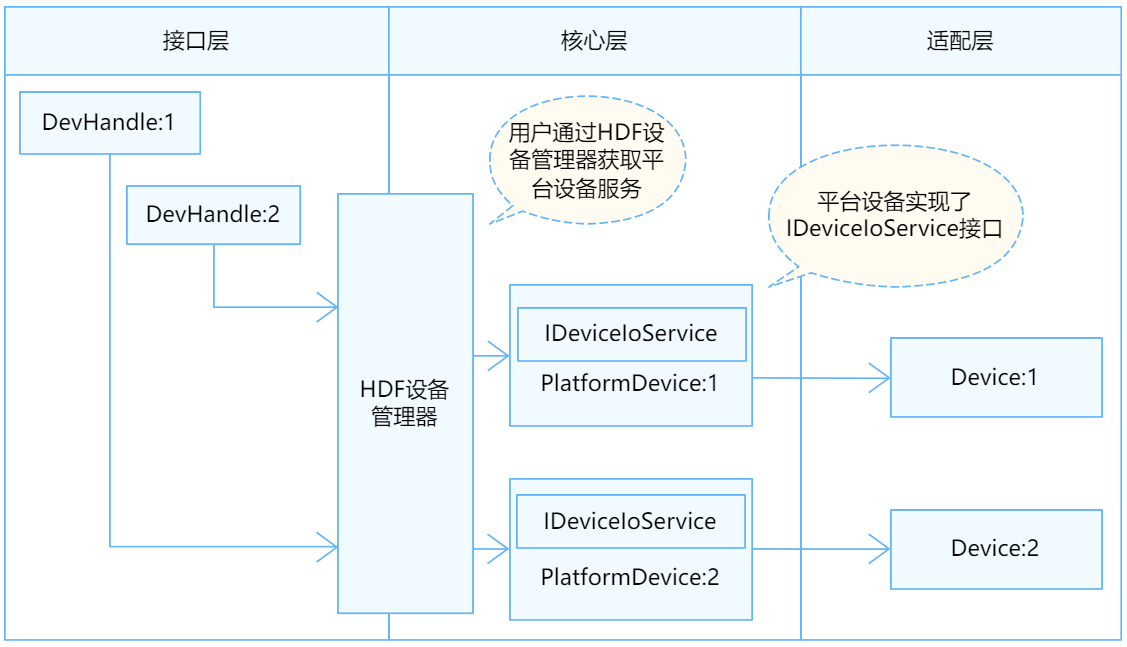
在HDF框架中,Watchdog接口适配模式采用独立服务模式(如图1所示)。在这种模式下,每一个设备对象会独立发布一个设备服务来处理外部访问,设备管理器收到API的访问请求之后,通过提取该请求的参数,达到调用实际设备对象的相应内部方法的目的。独立服务模式可以直接借助HDF设备管理器的服务管理能力,但需要为每个设备单独配置设备节点,增加内存占用。
独立服务模式下,核心层不会统一发布一个服务供上层使用,因此这种模式下驱动要为每个控制器发布一个服务,具体表现为:
驱动适配者需要实现HdfDriverEntry的Bind钩子函数以绑定服务。
device_info.hcs文件中deviceNode的policy字段为1或2,不能为0。
Watchdog模块各分层作用:
接口层提供打开看门狗设备、获取看门狗设备状态、启动看门狗设备、设置看门狗设备超时时间、获取看门狗设备超时时间、喂狗、停止看门狗设备超时时间、关闭看门狗设备的接口。
核心层主要提供看门狗控制器的添加、移除以及管理的能力,通过钩子函数与适配层交互。
适配层主要是将钩子函数的功能实例化,实现具体的功能。
图 1 Watchdog独立服务模式结构图
开发指导
场景介绍
对于无法直接观测到的软件异常,我们可以使用看门狗进行自动检测,并在异常产生时及时重置。当驱动开发者需要将Watchdog设备适配到OpenHarmony时,需要进行Watchdog驱动适配。下文将介绍如何进行Watchdog驱动适配。
接口说明
为了保证上层在调用Watchdog接口时能够正确的操作Watchdog控制器,核心层在//drivers/hdf_core/framework/support/platform/include/watchdog/watchdog_core.h中定义了以下钩子函数,驱动适配者需要在适配层实现这些函数的具体功能,并与钩子函数挂接,从而完成适配层与核心层的交互。
WatchdogMethod定义:
struct WatchdogMethod {
int32_t (*getStatus)(struct WatchdogCntlr *wdt, int32_t *status);
int32_t (*setTimeout)(struct WatchdogCntlr *wdt, uint32_t seconds);
int32_t (*getTimeout)(struct WatchdogCntlr *wdt, uint32_t *seconds);
int32_t (*start)(struct WatchdogCntlr *wdt);
int32_t (*stop)(struct WatchdogCntlr *wdt);
int32_t (*feed)(struct WatchdogCntlr *wdt);
int32_t (*getPriv)(struct WatchdogCntlr *wdt); // 【可选】如果WatchdogCntlr中的priv成员存在,则按需实例化
void (*releasePriv)(struct WatchdogCntlr *wdt); // 【可选】
};
表 1 WatchdogMethod成员的钩子函数功能说明
| 成员函数 | 入参 | 出参 | 返回值 | 功能 |
|---|---|---|---|---|
| getStatus | wdt:结构体指针,核心层Watchdog控制器 | status:int32_t类型指针,表示获取的看门狗的状态(打开或关闭) | HDF_STATUS相关状态 | 获取看门狗状态 |
| setTimeout | wdt:结构体指针,核心层Watchdog控制器 seconds:uint32_t类型,设置的看门狗超时时间 |
无 | HDF_STATUS相关状态 | 设置看门狗超时时间,单位秒,需要保证看门狗实际运行的时间符合该值 |
| getTimeout | wdt:结构体指针,核心层Watchdog控制器 | seconds:uint32_t类型指针,表示获取的超时时间 | HDF_STATUS相关状态 | 获取看门狗超时时间 |
| start | wdt:结构体指针,核心层Watchdog控制器 | 无 | HDF_STATUS相关状态 | 启动看门狗 |
| stop | wdt:结构体指针,核心层Watchdog控制器 | 无 | HDF_STATUS相关状态 | 停止看门狗 |
| feed | wdt:结构体指针,核心层Watchdog控制器 | 无 | HDF_STATUS相关状态 | 喂狗 |
| getPriv | wdt:结构体指针,核心层Watchdog控制器 | 无 | HDF_STATUS相关状态 | 获取看门狗驱动的私有数据 |
| releasePriv | wdt:结构体指针,核心层Watchdog控制器 | 无 | HDF_STATUS相关状态 | 释放看门狗驱动的私有数据 |
开发步骤
Watchdog模块适配包含以下四个步骤:
实例化驱动入口
配置属性文件
实例化Watchdog控制器对象
驱动调试
开发实例
下方将基于Hi3516DV300开发板以//device/soc/hisilicon/common/platform/watchdog/watchdog_hi35xx.c驱动为示例,展示需要驱动适配者提供哪些内容来完整实现设备功能。
实例化驱动入口
驱动入口必须为HdfDriverEntry(在 hdf_device_desc.h 中定义)类型的全局变量,且moduleName要和device_info.hcs中保持一致。HDF框架会将所有加载的驱动的HdfDriverEntry对象首地址汇总,形成一个类似数组的段地址空间,方便上层调用。
一般在加载驱动时HDF会先调用Bind函数,再调用Init函数加载该驱动。当Init调用异常时,HDF框架会调用Release释放驱动资源并退出。
Watchdog驱动入口开发参考:
struct HdfDriverEntry g_watchdogDriverEntry = { .moduleVersion = 1, .Bind = Hi35xxWatchdogBind, // 挂接Watchdog模块Bind实例化 .Init = Hi35xxWatchdogInit, // 挂接Watchdog模块Init实例化,本例是一个空实现,驱动适配者可根据自身需要添加相关操作 .Release = Hi35xxWatchdogRelease, // 挂接Watchdog模块Release实例化 .moduleName = "HDF_PLATFORM_WATCHDOG", // 【必要且与HCS文件中里面的moduleName匹配】 }; HDF_INIT(g_watchdogDriverEntry); // 调用HDF_INIT将驱动入口注册到HDF框架中配置属性文件
完成驱动入口注册之后,需要在device_info.hcs文件中添加deviceNode描述。deviceNode信息与驱动入口注册相关。本例以一个Watchdog控制器为例,如有多个器件信息,则需要在device_info文件增加对应的deviceNode描述,以及在watchdog_config.hcs文件中增加对应的器件属性。器件属性值与核心层WatchdogCntlr成员的默认值或限制范围有密切关系,比如Watchdog设备号,需要在watchdog_config.hcs文件中增加对应的器件属性。
独立服务模式的特点是device_info.hcs文件中设备节点代表着一个设备对象,如果存在多个设备对象,则按需添加,注意服务名与驱动私有数据匹配的关键字名称必须唯一。其中各项参数如表2所示:
表 2 device_info.hcs节点参数说明
|成员名|值| |——–|——–| |policy|驱动服务发布的策略,Watchdog控制器具体配置为2,表示驱动对内核态和用户态都发布服务| |priority|驱动启动优先级(0-200),值越大优先级越低。Watchdog控制器具体配置为20| |permission|驱动创建设备节点权限,Watchdog控制器具体配置为0664| |moduleName|驱动名称,Watchdog控制器固定为HDF_PLATFORM_WATCHDOG| |serviceName|驱动对外发布服务的名称,Watchdog控制器服务名设置为HDF_PLATFORM_WATCHDOG_X,X代表Watchdog控制器编号| |deviceMatchAttr|驱动私有数据匹配的关键字,Watchdog控制器设置为hisilicon_hi35xx_watchdog_X,X代表Watchdog控制器编号|
- device_info.hcs 配置参考:
在//vendor/hisilicon/hispark_taurus/hdf_config/device_info/device_info.hcs文件中添加deviceNode描述。
```c
root {
device_info {
match_attr = "hdf_manager";
device_watchdog :: device {
device0 :: deviceNode { // 驱动的DeviceNode节点
policy = 2; // policy字段是驱动服务发布的策略,如果需要面向用户态,则为2
priority = 20; // 驱动启动优先级
permission = 0644; // 驱动创建设备节点权限
moduleName = "HDF_PLATFORM_WATCHDOG"; // 【必要】用于指定驱动名称,该字段的值必须和驱动入口结构的moduleName值一致
serviceName = "HDF_PLATFORM_WATCHDOG_0"; // 【必要】驱动对外发布服务的名称,必须唯一。
deviceMatchAttr = "hisilicon_hi35xx_watchdog_0"; // 【必要】用于配置控制器私有数据,必须和驱动私有数据配置表watchdog_config.hcs中的match_attr值保持一致。
}
...... // 如果存在多个watchdog设备时【必须】添加节点,否则不用
}
}
}
```
- watchdog_config.hcs 配置参考:
在//device/soc/hisilicon/hi3516dv300/sdk_liteos/hdf_config/watchdog/watchdog_config.hcs文件配置器件属性,其中配置参数如下:
```c
root {
platform {
template watchdog_controller { // 【必要】配置模板,如果下面节点使用时继承该模板,则节点中未声明的字段会使用该模板中的默认值
id = 0; // watchdog ID号
match_attr = "";
regBase = 0x12050000; // 【必要】地址映射需要,物理基地址
regStep = 0x1000; // 【必要】地址映射需要,寄存器偏移步进
}
controller_0x12050000 :: watchdog_controller { // 【必要】是作为设备驱动私有数据匹配的关键字
match_attr = "hisilicon_hi35xx_watchdog_0"; // 【必要】必须和device_info.hcs中的deviceMatchAttr值一致
}
...... // 如果存在多个watchdog设备时【必须】添加节点,否则不用
}
}
```
需要注意的是,新增watchdog_config.hcs配置文件后,必须在产品对应的hdf.hcs文件中将其包含如下语句所示,否则配置文件无法生效。
```c
#include "../../../../device/soc/hisilicon/hi3516dv300/sdk_liteos/hdf_config/watchdog/watchdog_config.hcs" // 配置文件相对路径
```
实例化Watchdog控制器对象
完成驱动入口注册之后,下一步就是以核心层WatchdogCntlr对象的初始化为核心,包括驱动适配者自定义结构体(传递参数和数据),实例化WatchdogCntlr成员WatchdogMethod(让用户可以通过接口来调用驱动底层函数),实现HdfDriverEntry成员函数(Bind,Init,Release)。
驱动适配者自定义结构体参考。
从驱动的角度看,驱动适配者自定义结构体是参数和数据的载体,而且watchdog_config.hcs文件中的数值会被HDF读入通过DeviceResourceIface来初始化结构体成员,其中一些重要数值也会传递给核心层WatchdogCntlr对象,例如watchdog设备ID号。
struct Hi35xxWatchdog { struct WatchdogCntlr wdt; // 【必要】是核心层控制对象,具体描述见下面 OsalSpinlock lock; // 【必要】驱动适配者需要基于此锁变量对watchdog设备实现对应的加锁解锁 volatile unsigned char *regBase; // 【必要】地址映射需要,寄存器基地址 uint32_t phyBase; // 【必要】地址映射需要,物理基址 uint32_t regStep; // 【必要】地址映射需要,寄存器偏移步进 }; struct WatchdogCntlr { // WatchdogCntlr是核心层控制器结构体,其中的成员在Init函数中会被赋值。 struct IDeviceIoService service; // 驱动服务 struct HdfDeviceObject *device; // 驱动设备对象 OsalSpinlock lock; // 自旋锁 struct WatchdogMethod *ops; // 钩子函数 int16_t wdtId; // watchdog设备ID号 void *priv; // 私有数据 };WatchdogCntlr成员钩子函数结构体WatchdogMethod的实例化。
static struct WatchdogMethod g_method = { // 钩子函数实例化 .getStatus = Hi35xxWatchdogGetStatus, // 获取看门狗状态 .start = Hi35xxWatchdogStart, // 启动看门狗 .stop = Hi35xxWatchdogStop, // 停止看门狗 .setTimeout = Hi35xxWatchdogSetTimeout, // 设置看门狗超时时间 .getTimeout = Hi35xxWatchdogGetTimeout, // 获取看门狗超时时间 .feed = Hi35xxWatchdogFeed, // 喂狗 };Init函数和Bind函数开发参考:
入参:
HdfDeviceObject:HDF框架给每一个驱动创建的设备对象,用来保存设备相关的私有数据和服务接口。
返回值:
HDF_STATUS相关状态 (表3为部分展示,如需使用其他状态,可参考//drivers/hdf_core/interfaces/inner_api/utils/hdf_base.h中HDF_STATUS的定义)。
表 3 HDF_STATUS相关状态说明
|状态(值)|问题描述| |——–|——–| |HDF_ERR_INVALID_OBJECT|控制器对象非法| |HDF_ERR_MALLOC_FAIL|内存分配失败| |HDF_ERR_IO|I/O 错误| |HDF_SUCCESS|初始化成功| |HDF_FAILURE|初始化失败|
函数说明: 初始化自定义结构体对象,初始化WatchdogCntlr成员,调用核心层WatchdogCntlrAdd函数,完成看门狗控制器的添加。 ```c // 一般而言,Init函数需要根据入参(HdfDeviceObject对象)的属性值初始化Hi35xxWatchdog结构体的成员, // 但watchdog_hi35xx.c示例中是在bind函数中实现的 static int32_t Hi35xxWatchdogInit(struct HdfDeviceObject *device) { (void)device; return HDF_SUCCESS; } static int32_t Hi35xxWatchdogBind(struct HdfDeviceObject *device) { int32_t ret; struct Hi35xxWatchdog *hwdt = NULL; ...... hwdt = (struct Hi35xxWatchdog *)OsalMemCalloc(sizeof(*hwdt)); // Hi35xxWatchdog 结构体指针的内存申请 ...... hwdt->regBase = OsalIoRemap(hwdt->phyBase, hwdt->regStep); // 地址映射 ...... hwdt->wdt.priv = (void *)device->property; // 【必要】此处是将设备属性的内容赋值给priv成员,但后续没有调用 priv 成员, // 如果需要用到priv成员,需要额外实例化WatchdogMethod的getPriv和releasePriv成员函数 hwdt->wdt.ops = &g_method; // 【必要】WatchdogMethod实例化对象的挂载 hwdt->wdt.device = device; // 【必要】这是为了方便HdfDeviceObject与WatchdogcCntlr相互转化 ret = WatchdogCntlrAdd(&hwdt->wdt); // 【必要】调用此函数初始化核心层结构体,返回成功信号后驱动才完全接入平台核心层 if (ret != HDF_SUCCESS) { // 不成功的话,需要去除映射并释放Init函数申请的资源 OsalIoUnmap((void *)hwdt->regBase); OsalMemFree(hwdt); return ret; } return HDF_SUCCESS; } ```Release函数开发参考:
入参:
HdfDeviceObject:HDF框架给每一个驱动创建的设备对象,用来保存设备相关的私有数据和服务接口。
返回值:
无。
函数说明:
该函数需要在驱动入口结构体中赋值给Release,当HDF框架调用Init函数初始化驱动失败时,可以调用Release释放驱动资源。该函数中需包含释放内存和删除控制器等操作。
static void Hi35xxWatchdogRelease(struct HdfDeviceObject *device) { struct WatchdogCntlr *wdt = NULL; struct Hi35xxWatchdog *hwdt = NULL; ...... wdt = WatchdogCntlrFromDevice(device); // 【必要】通过device获取WatchdogCntlr ...... if (wdt == NULL) { return; } WatchdogCntlrRemove(wdt); // 【必要】调用WatchdogCntlrRemove函数来释放WatchdogCntlr对象的内容 hwdt = (struct Hi35xxWatchdog *)wdt; // 这里将WatchdogCntlr转化为Hi35xxWatchdog if (hwdt->regBase != NULL) { // 【必要】解除地址映射 OsalIoUnmap((void *)hwdt->regBase); hwdt->regBase = NULL; } OsalMemFree(hwdt); // 【必要】释放驱动适配者自定义对象占用的内存 }
驱动调试
【可选】针对新增驱动程序,建议验证驱动基本功能,例如挂载后的信息反馈,获取看门狗状态、喂狗等。
你可能感兴趣的鸿蒙文章
热门推荐
-
2、 优质文章
-
3、 gt
-
7、 openharmony
-
9、 golang
-
10、 Vue中input框自动聚焦