harmony 鸿蒙A Method for Rapidly Porting the OpenHarmony Linux Kernel
A Method for Rapidly Porting the OpenHarmony Linux Kernel
Overview
This document describes how to quickly port OpenHarmony to a third-party chip platform by using the existing capabilities of the Linux kernel of the third-party chip platform.
Overall Porting Approach
Kernel Mode Layer and User Mode Layer
For easy description, we divide the OpenHarmony architecture into two parts:
OpenHarmony = Kernel mode layer + User mode layer
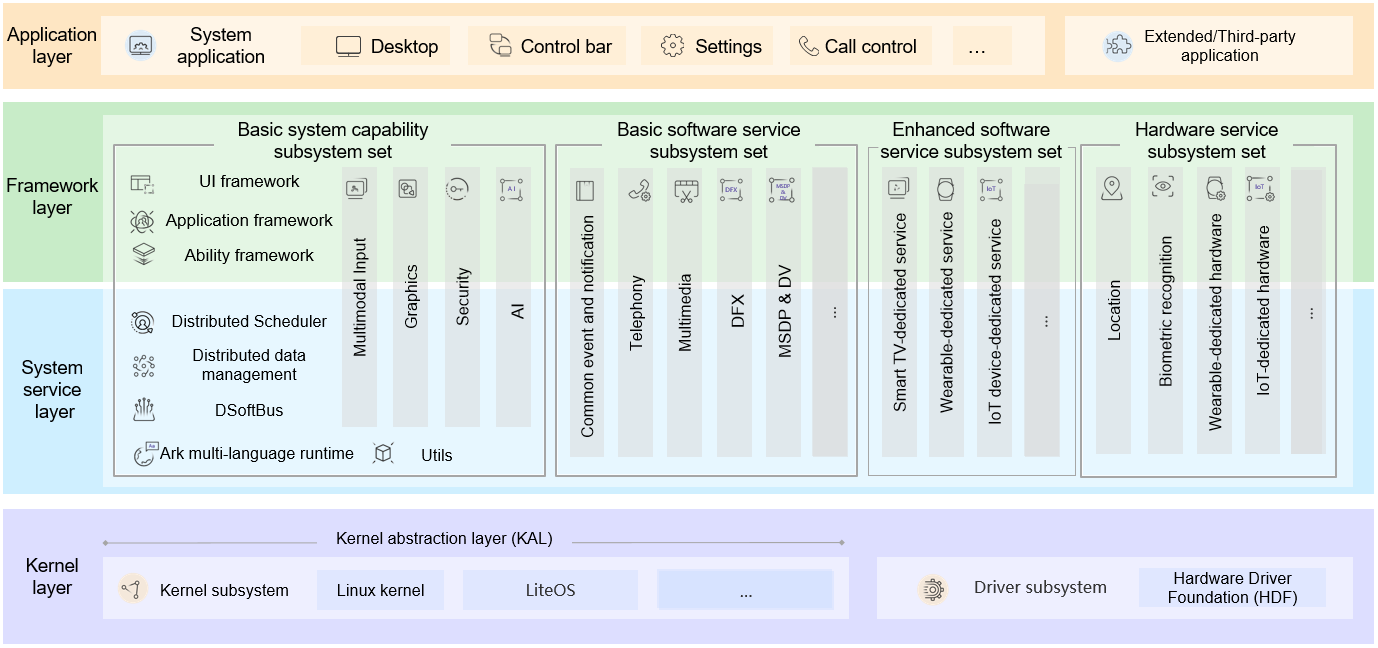
The kernel mode layer is the OpenHarmony kernel layer (purple part in the figure). It consists of the kernel, such as Linux Kernel and LiteOS, and features, such as Hardware Driver Foundation (HDF), running in the kernel mode.
The user mode layer includes other parts except the OpenHarmony kernel layer. It consists of the system service layer, framework layer, and application layer from the bottom to the top.
The user mode layer of OpenHarmony is loosely coupled with the third-party chip platform and is easy to port. The kernel and HDF at the kernel mode layer are closely coupled with the third-party chip platform and are difficult to port. This document focus on the porting of the kernel mode layer. In addition, it describes only the quick porting of the Linux kernel. It does not include the porting of LiteOS.
Composition of the Kernel Mode Layer
The OpenHarmony kernel mode layer can be further divided as follows:
OpenHarmony kernel mode layer = OpenHarmony Linux kernel + OpenHarmony kernel-mode features (mandatory features, such as HDF, and optional features, such as HMDFS)
OpenHarmony Linux kernel = Standard LTS Linux kernel + Third-party SoC platform code + OpenHarmony basic kernel-mode code (most basic code required for running of the OpenHarmony user mode layer)
Therefore, the OpenHarmony kernel mode layer includes the following:
- Standard LTS Linux kernel
- Third-party SoC platform code
- OpenHarmony basic kernel-mode code
- OpenHarmony kernel-mode features, such as HDF

The standard LTS Linux kernel and third-party SoC chip platform code constitute the basis of a third-party Linux kernel. The OpenHarmony kernel mode layer can be composed of either of the following:
OpenHarmony kernel mode layer = Third-party Linux kernel + OpenHarmony basic kernel-mode code + OpenHarmony kernel-mode features (such as HDF and HMDFS)
In this case, the OpenHarmony kernel mode layer consists of the third-party Linux kernel and OpenHarmony basic code and features for the kernel mode.
OpenHarmony kernel mode layer = OpenHarmony Linux kernel + OpenHarmony kernel-mode features (such as HDF and HMDFS)
In this case, the OpenHarmony kernel mode layer consists of OpenHarmony kernel and features. However, the OpenHarmony kernel supports few third-party chip platforms.
In the following, we elaborate how to port OpenHarmony that uses with the third-party Linux kernel.
Overall Porting Process
The porting process is as follows:
- Prepare the build environment, including copying the existing kernel code of the third-party chip platform to the OpenHarmony build environment.
- Port the OpenHarmony basic kernel-mode code.
- Port OpenHarmony mandatory kernel-mode features (such as HDF).
Procedure
The following uses Raspberry Pi 3b (BCM2837) as an example to describe how to port OpenHarmony to Raspberry Pi.
Setting Up the Environment
Copy the third-party kernel code to the OpenHarmony build environment.
Build the standard Hi3516D V300 kernel, clone the Raspberry Pi kernel source code, and copy it to the manifest output directory.
export PROJ_ROOT=[OpenHarmony manifest] git clone https://gitee.com/xfan1024/oh-rpi3b-kernel.git cp -r oh-rpi3b-kernel $PROJ_ROOT/out/KERNEL_OBJ/kernel/src_tmp/linux-rpi3bConfigure the Raspberry Pi kernel build environment.
# Go to the Raspberry Pi kernel directory. cd out/KERNEL_OBJ/kernel/src_tmp/linux-rpi3b # Configure the build environment, and use clang provided by the project to build the Raspberry Pi kernel source code. export PATH=$PROJ_ROOT/prebuilts/clang/ohos/linux-x86_64/llvm/bin:$PROJ_ROOT/prebuilts/gcc/linux-x86/arm/gcc-linaro-7.5.0-arm-linux-gnueabi/bin/:$PATH export MAKE_OPTIONS="ARCH=arm CROSS_COMPILE=arm-linux-gnueabi- CC=clang HOSTCC=clang" export PRODUCT_PATH=vendor/hisilicon/hispark_taurus_linuxComment out the flags that cannot be recognized by clang.
In the PROJ_ROOT/out/KERNEL_OBJ/kernel/src_tmp/linux-rpi3b/arch/arm/Makefile file, comment out the following line:
KBUILD_CFLAGS +=-fno-omit-frame-pointer -mapcs -mno-sched-prolog
Porting Basic Kernel-Mode Code
Currently, the basic kernel-mode code of OpenHarmony is related to the log service. The lightweight kernel log service code includes the following:
drivers/staging/hilog
drivers/staging/hievent
Copy the preceding code from the kernel/linux/linux-4.19/drivers/staging directory of OpenHarmony to out/KERNEL_OBJ/kernel/src_tmp/linux-rpi3b/drivers/staging.
Add the following code to the third-party kernel file Kconfig in the drivers/staging directory:
source "drivers/staging/hilog/Kconfig"
source "drivers/staging/hievent/Kconfig"
Add the following code to the third-party kernel file Makefile in the drivers/staging directory:
obj-$(CONFIG_HILOG) += hilog/
obj-$(CONFIG_HIEVENT) += hievent/
Enable the CONFIG macros CONFIG_HILOG and CONFIG_HIEVENT in the kernel config section.
For details about how to use the logs, see Hilog_lite.
Porting the HDF Feature
Install HDF patches.
Run the shell script to apply HDF patches.
- Set the four variables in the patch_hdf.sh script.
- Obtain the patch_hdf.sh script.
- Run the patch_hdf.sh script to pass the four variables in sequence.
Run the following command:
./patch_hdf.sh [Project root directory path] [Kernel directory path] [Kernel patch path] [Device name]The following uses Raspberry Pi 3b as an example:
# Go to the Raspberry Pi kernel directory. PROJ_ROOT/drivers/hdf_core/adapter/khdf/linux/patch_hdf.sh \ PROJ_ROOT # Specify the path of the project root directory.\ PROJ_ROOT/out/KERNEL_OBJ/kernel/src_tmp/linux-rpi3b # Specify the kernel directory for applying the patch.\ PROJ_ROOT/kernel/linux/patches/linux-4.19 # Kernel patch patch.\ hi3516dv300 # Device name.Configure the config file.
Configure basic HDF settings. If other functions are required, enable the corresponding driver switch by using menuconfig.
After HDF patches are installed, the HDF function is disabled by default. To enable the HDF function, perform the following settings:
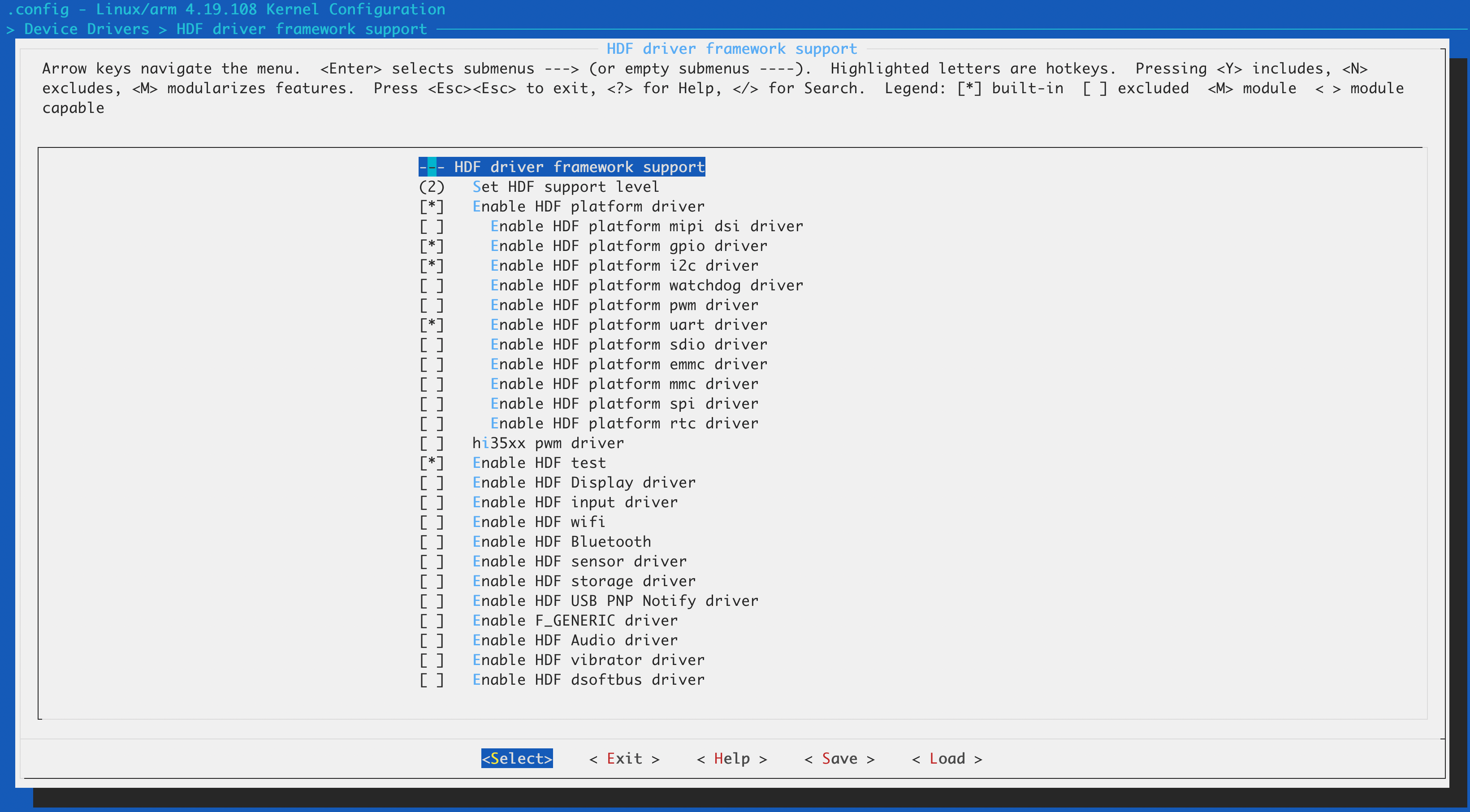
CONFIG_DRIVERS_HDF=y CONFIG_HDF_SUPPORT_LEVEL=2 CONFIG_DRIVERS_HDF_PLATFORM=y CONFIG_DRIVERS_HDF_PLATFORM_MIPI_DSI=y CONFIG_DRIVERS_HDF_PLATFORM_GPIO=y CONFIG_DRIVERS_HDF_PLATFORM_I2C=y CONFIG_DRIVERS_HDF_PLATFORM_UART=y CONFIG_DRIVERS_HDF_TEST=yAlternatively, run the following command to enable the HDF configuration on the menuconfig page:
# Generate the .config file. make ${MAKE_OPTIONS} rpi3b_oh_defconfig # Modify the HDF kernel configuration. make ${MAKE_OPTIONS} menuconfig # [*] Device Drivers # [*] HDF driver framework support --->The configuration (in Device Drivers > HDF driver framework support) is as follows:
Building the Image
# Run the following command:
make ${MAKE_OPTIONS} -j33 zImage
(Optional) Building and Running HDF Test Cases
Overview
The HDF test cases are used to verify basic functions of the HDF framework and peripherals. This document describes the HDF kernel-mode test cases.
Prerequisites
- In menuconfig, CONFIG_DRIVERS_HDF_TEST is set to y.
- The standard Hi3516D V300 kernel is built completely.
Test Case Build and Test Method
Use the hdc_std tool to push the test case execution file to the device and execute the test cases. The procedure is as follows:
- Build the HDF test cases.
- Use the hdc_std tool to push the test case execution file to the device.
- Go to the data/test directory of the device and execute the test file.
The procedure is as follows:
Build the HDF test cases.
Run the following command:
./build.sh --product-name hispark_taurus_standard --build-target hdf_testWait until the build is complete.
Copy the test files to the target device (Raspberry Pi in this example).
Method 1: Use the hdc_std tool.
Create the data/test directory in Raspberry Pi.
mkdir -p data/testPush the dependencies and test cases to Raspberry Pi.
hdc file send XXX\out\{device_name}\hdf\hdf\libhdf_test_common.z.so /system/lib hdc file send XXX\out\{device_name}\tests\unittest\hdf\config\hdf_adapter_uhdf_test_config /data/test hdc file send XXX\out\{device_name}\tests\unittest\hdf\devmgr\DevMgrTest /data/test hdc file send XXX\out\{device_name}\tests\unittest\hdf\osal\OsalTest /data/test hdc file send XXX\out\{device_name}\tests\unittest\hdf\sbuf\SbufTest /data/test
Method 2: Copy the test files to Raspberry Pi using its memory card.
Remove the serial port and USB cable of Raspberry Pi from the PC, and remove its memory card. The zImage file in the memory card will be replaced. Back it up in advance.
Insert the memory card into the port of the PC used for porting, download the zImage file and the test/ folder to the PC, and then copy them to the root directory of the memory card.
Insert the memory card into Raspberry Pi.
# Enable the Raspberry Pi file system to read the root directory of the memory card. mount -t vfat /dev/block/mmcblk0p1 /boot cd /boot/[Test file directory] # Enable system files to be modified. mount -o remount,rw / # Install the test library. mv libhdf_test_common.z.so /system/lib mkdir /data/test mv * /data/test
Perform the test.
Go to the data/test directory.
cd /data/testAssign the execute permission on the test files.
chmod 777 hdf_adapter_uhdf_test_config DevMgrTest OsalTest SbufTestStart the test.
./hdf_adapter_uhdf_test_config ./DevMgrTest ./OsalTest ./SbufTestIf PASSED is displayed for all test items, HDF is functioning.
Example: DevMgrTest case
./DevMgrTest Running main() from gmock_main.cc [==========] Running 1 test from 1 test case. [----------] Global test environment set-up. [----------] 1 test from DevMgrTest [ RUN ] DevMgrTest.DriverLoaderTest_001 [ OK ] DevMgrTest.DriverLoaderTest_001 (0 ms) [----------] 1 test from DevMgrTest (0 ms total) [----------] Global test environment tear-down Gtest xml output finished [==========] 1 test from 1 test case ran. (0 ms total) [ PASSED ] 1 test.
你可能感兴趣的鸿蒙文章
harmony 鸿蒙Combo Solution – ASR Chip Porting Case
harmony 鸿蒙Mini-System Devices with Screens – Bestechnic SoC Porting Case
harmony 鸿蒙IoT Solution - Chipsea CST85 Chip Porting Case
harmony 鸿蒙Standard System Solution – Rockchip RK3568 Porting Case
- 所属分类: 后端技术
- 本文标签:
热门推荐
-
2、 优质文章
-
3、 gt
-
7、 openharmony
-
9、 golang
-
10、 Vue中input框自动聚焦