harmony 鸿蒙Video Encoding
Video Encoding
You can call the native APIs provided by the VideoEncoder module to encode a video, that is, to compress video data into a video stream.
For details about the supported encoding capabilities, see AVCodec Supported Formats.
The following table lists the video encoding capabilities supported:
| Capability | How to Use |
|---|---|
| Layered encoding Setting the LTR frame and reference frame |
For details, see Temporally Scalable Video Coding. |
| Repeat encoding of historical frames | For details, see OH_MD_KEY_VIDEO_ENCODER_REPEAT_PREVIOUS_FRAME_AFTER and OH_MD_KEY_VIDEO_ENCODER_REPEAT_PREVIOUS_MAX_COUNT. |
Constraints
- The buffer mode does not support 10-bit image data.
- Due to limited hardware encoder resources, you must call OH_VideoEncoder_Destroy to destroy every encoder instance when it is no longer needed.
- If flush(), reset(), stop(), or destroy() is executed in a non-callback thread, the execution result is returned after all callbacks are executed.
- Once Flush, Reset, or Stop is called, the system reclaims the OH_AVBuffer. Therefore, do not continue to operate the OH_AVBuffer obtained through the previous callback function.
- The buffer mode and surface mode use the same APIs. Therefore, the surface mode is described as an example.
- In buffer mode, after obtaining the pointer to an OH_AVBuffer instance through the callback function OH_AVCodecOnNeedInputBuffer, call OH_VideoEncoder_PushInputBuffer to notify the system that the buffer has been fully utilized. In this way, the system will proceed with encoding the data contained in the buffer. If the OH_NativeBuffer instance is obtained through OH_AVBuffer_GetNativeBuffer and its lifecycle extends beyond that of the OH_AVBuffer pointer instance, you mut perform data duplication. In this case, you should manage the lifecycle of the newly generated OH_NativeBuffer object to ensure that the object can be correctly used and released.
Surface Input and Buffer Input
Surface input and buffer input differ in data sources.
They are applicable to different scenarios.
- Surface input indicates that the OHNativeWindow is used to transfer passed-in data. It supports connection with other modules, such as the camera module.
- Buffer input refers to a pre-allocated memory area. The caller needs to copy original data to this memory area. It is more applicable to scenarios such as reading video data from files.
The two also differ slightly in the API calling modes:
- In buffer mode, the caller calls OH_VideoEncoder_PushInputBuffer to input data. In surface mode, the caller, before the encoder is ready, calls OH_VideoEncoder_GetSurface to obtain the OHNativeWindow for video data transmission.
- In buffer mode, you can use attr in OH_AVBuffer to pass in the End of Stream (EOS) flag, and the encoder stops when it reads the last frame. In surface mode, the caller calls OH_VideoEncoder_NotifyEndOfStream to notify the encoder of EOS.
Data transfer performance in surface mode is better than that in buffer mode.
For details about the development procedure, see Surface Input and Buffer Input.
State Machine Interaction
The following figure shows the interaction between states.
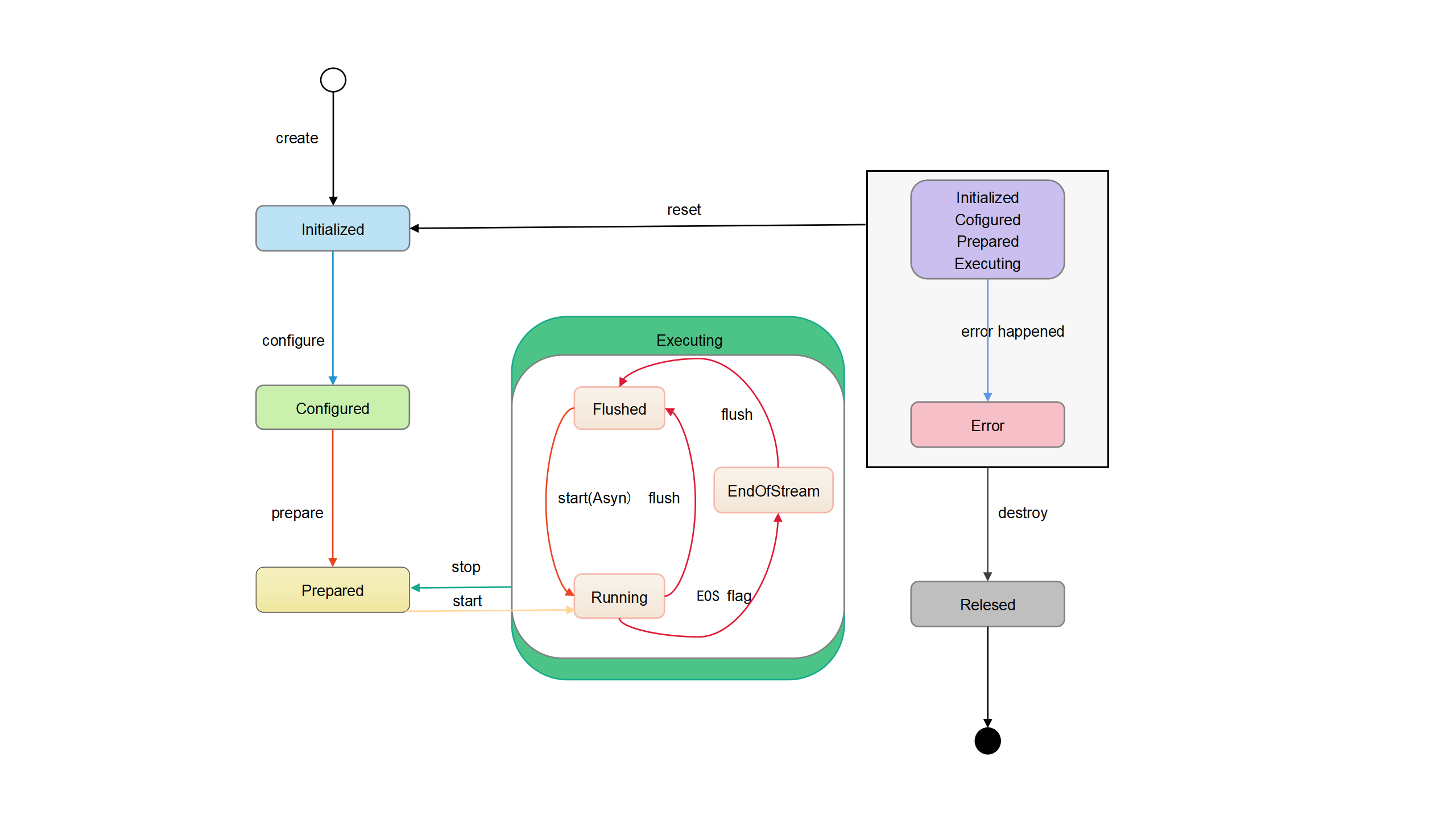
An encoder enters the Initialized state in either of the following ways:
- When an encoder instance is initially created, the encoder enters the Initialized state.
- When OH_VideoEncoder_Reset is called in any state, the encoder returns to the Initialized state.
When the encoder is in the Initialized state, you can call OH_VideoEncoder_Configure to configure the encoder. After the configuration, the encoder enters the Configured state.
When the encoder is in the Configured state, you can call OH_VideoEncoder_Prepare() to switch it to the Prepared state.
When the encoder is in the Prepared state, you can call OH_VideoEncoder_Start to switch it to the Executing state.
- When the encoder is in the Executing state, you can call OH_VideoEncoder_Stop to switch it back to the Prepared state.
In rare cases, the encoder may encounter an error and enter the Error state. If this is the case, an invalid value can be returned or an exception can be thrown through a queue operation.
- When the encoder is in the Error state, you can either call OH_VideoEncoder_Reset to switch it to the Initialized state or call OH_VideoEncoder_Destroy to switch it to the Released state.
The Executing state has three substates: Flushed, Running, and End-of-Stream.
- After OH_VideoEncoder_Start is called, the encoder enters the Running substate immediately.
- When the encoder is in the Executing state, you can call OH_VideoEncoder_Flush to switch it to the Flushed substate.
- After all data to be processed is transferred to the encoder, the AVCODEC_BUFFER_FLAGS_EOS flag is added to the last input buffer in the input buffers queue. Once this flag is detected, the encoder transits to the End-of-Stream substate. In this state, the encoder does not accept new inputs, but continues to generate outputs until it reaches the tail frame.
When the encoder is no longer needed, you must call OH_VideoEncoder_Destroy to destroy the encoder instance, which then transitions to the Released state.
How to Develop
Read VideoEncoder for the API reference.
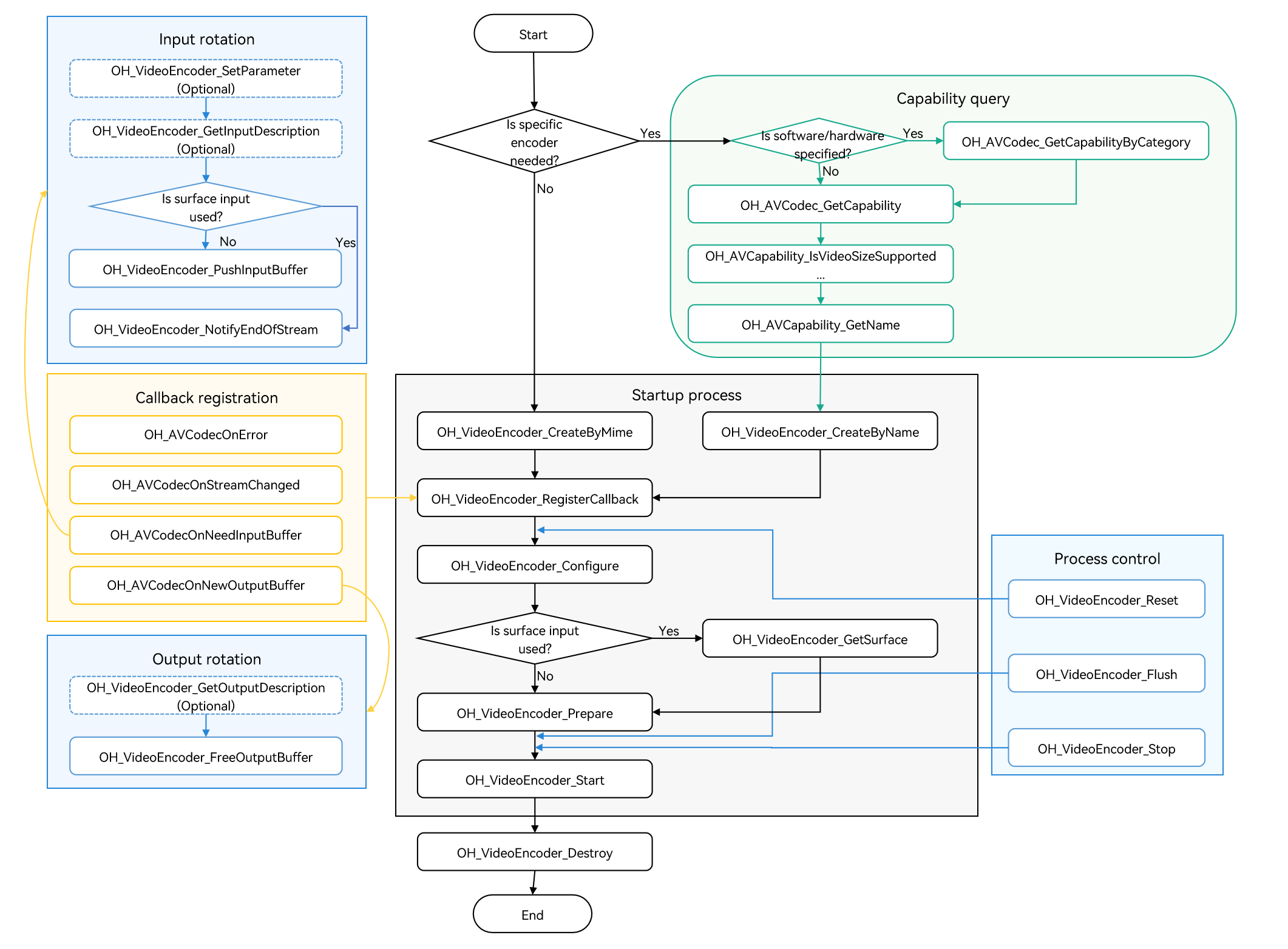
The figure below shows the call relationship of video encoding.
The dotted line indicates an optional operation.
The solid line indicates a mandatory operation.
Linking the Dynamic Libraries in the CMake Script
target_link_libraries(sample PUBLIC libnative_media_codecbase.so)
target_link_libraries(sample PUBLIC libnative_media_core.so)
target_link_libraries(sample PUBLIC libnative_media_venc.so)
NOTE
The word sample in the preceding code snippet is only an example. Use the actual project directory name.
Defining the Basic Structure
The sample code provided in this section adheres to the C++17 standard and is for reference only. You can define your own buffer objects by referring to it.
Add the header files.
#include <condition_variable> #include <memory> #include <mutex> #include <queue> #include <shared_mutex>Define the information about the encoder callback buffer.
struct CodecBufferInfo { CodecBufferInfo(uint32_t index, OH_AVBuffer *buffer): index(index), buffer(buffer), isValid(true) {} CodecBufferInfo(uint32_t index, OH_AVFormat *parameter): index(index), parameter(parameter), isValid(true) {} // Callback buffer. OH_AVBuffer *buffer = nullptr; // In surface mode, pass the frame-specific parameter of the callback, which can be used only after the frame-specific parameter callback function is registered. OH_AVFormat *parameter = nullptr; // Index of the callback buffer. uint32_t index = 0; // Check whether the current buffer information is valid. bool isValid = true; };Define the input and output queue for encoding.
class CodecBufferQueue { public: // Pass the callback buffer information to the queue. void Enqueue(const std::shared_ptr<CodecBufferInfo> bufferInfo) { std::unique_lock<std::mutex> lock(mutex_); bufferQueue_.push(bufferInfo); cond_.notify_all(); } // Obtain the information about the callback buffer. std::shared_ptr<CodecBufferInfo> Dequeue(int32_t timeoutMs = 1000) { std::unique_lock<std::mutex> lock(mutex_); (void)cond_.wait_for(lock, std::chrono::milliseconds(timeoutMs), [this]() { return !bufferQueue_.empty(); }); if (bufferQueue_.empty()) { return nullptr; } std::shared_ptr<CodecBufferInfo> bufferInfo = bufferQueue_.front(); bufferQueue_.pop(); return bufferInfo; } // Clear the queue. The previous callback buffer becomes unavailable. void Flush() { std::unique_lock<std::mutex> lock(mutex_); while (!bufferQueue_.empty()) { std::shared_ptr<CodecBufferInfo> bufferInfo = bufferQueue_.front(); // After the flush, stop, reset, and destroy operations are performed, the previous callback buffer information is invalid. bufferInfo->isValid = false; bufferQueue_.pop(); } } private: std::mutex mutex_; std::condition_variable cond_; std::queue<std::shared_ptr<CodecBufferInfo>> bufferQueue_; };Configure global variables.
These global variables are for reference only. They can be encapsulated into an object based on service requirements.
// Video frame width. int32_t width = 320; // Video frame height. int32_t height = 240; // Video pixel format. OH_AVPixelFormat pixelFormat = AV_PIXEL_FORMAT_NV12; // Video width stride. int32_t widthStride = 0; // Video height stride. int32_t heightStride = 0; // Pointer to the encoder instance. OH_AVCodec *videoEnc = nullptr; // Encoder synchronization lock. std::shared_mutex codecMutex; // Encoder input queue. CodecBufferQueue inQueue; // Encoder output queue. CodecBufferQueue outQueue;
Surface Input
The following walks you through how to implement the entire video encoding process in surface mode. In this example, surface data is input and encoded into a H.264 stream.
Currently, the VideoEncoder module supports only data rotation in asynchronous mode.
Add the header files.
#include <multimedia/player_framework/native_avcodec_videoencoder.h> #include <multimedia/player_framework/native_avcapability.h> #include <multimedia/player_framework/native_avcodec_base.h> #include <multimedia/player_framework/native_avformat.h> #include <multimedia/player_framework/native_avbuffer.h> #include <fstream>Create an encoder instance.
You can create an encoder by name or MIME type. In the code snippet below, the following variables are used:
- videoEnc: pointer to the video encoder instance.
- capability: pointer to the encoder’s capability.
- OH_AVCODEC_MIMETYPE_VIDEO_AVC: AVC video codec.
The following is an example:
// Create an encoder by name. If your application has special requirements, for example, expecting an encoder that supports a certain resolution, you can call OH_AVCodec_GetCapability to query the capability first. OH_AVCapability *capability = OH_AVCodec_GetCapability(OH_AVCODEC_MIMETYPE_VIDEO_AVC, true); // Create a hardware encoder instance. OH_AVCapability *capability= OH_AVCodec_GetCapabilityByCategory(OH_AVCODEC_MIMETYPE_VIDEO_AVC, true, HARDWARE); const char *codecName = OH_AVCapability_GetName(capability); OH_AVCodec *videoEnc = OH_VideoEncoder_CreateByName(codecName);// Create an encoder by MIME type. Only specific codecs recommended by the system can be created in this way. // Only hardware encoders can be created. OH_AVCodec *videoEnc = OH_VideoEncoder_CreateByMime(OH_AVCODEC_MIMETYPE_VIDEO_AVC);Call OH_VideoEncoder_RegisterCallback() to register the callback functions.
Register the OH_AVCodecCallback struct that defines the following callback function pointers:
- OH_AVCodecOnError, a callback used to report a codec operation error. For details about the error codes, see OH_AVCodecOnError.
- OH_AVCodecOnStreamChanged, a callback used to report a codec stream change, for example, format change.
- OH_AVCodecOnNeedInputBuffer, a callback used to report input data required. This callback does not take effect, since you input data through the obtained surface.
- OH_AVCodecOnNewOutputBuffer, a callback used to report output data generated, which means that encoding is complete.
The following is an example:
// Set the OH_AVCodecOnError callback function, which is used to report a codec operation error. static void OnError(OH_AVCodec *codec, int32_t errorCode, void *userData) { // Process the error code in the callback. (void)codec; (void)errorCode; (void)userData; }// Set the OH_AVCodecOnStreamChanged callback function, which is used to report an encoding stream change. static void OnStreamChanged(OH_AVCodec *codec, OH_AVFormat *format, void *userData) { // In surface mode, this callback function is triggered when the surface resolution changes. (void)codec; (void)userData; OH_AVFormat_GetIntValue(format, OH_MD_KEY_VIDEO_WIDTH, &width); OH_AVFormat_GetIntValue(format, OH_MD_KEY_VIDEO_HEIGHT, &height); }// Set the OH_AVCodecOnNeedInputBuffer callback function, which is used to send an input frame to the data queue. static void OnNeedInputBuffer(OH_AVCodec *codec, uint32_t index, OH_AVBuffer *buffer, void *userData) { // In surface mode, this callback function does not take effect. Data is input through the obtained surface. (void)userData; (void)index; (void)buffer; }// Set the OH_AVCodecOnNewOutputBuffer callback function, which is used to send an encoded frame to the output queue. static void OnNewOutputBuffer(OH_AVCodec *codec, uint32_t index, OH_AVBuffer *buffer, void *userData) { // The data buffer of the finished frame and its index are sent to outQueue. (void)codec; (void)userData; outQueue.Enqueue(std::make_shared<CodecBufferInfo>(index, buffer)); }// Call OH_VideoEncoder_RegisterCallback() to register the callback functions. OH_AVCodecCallback cb = {&OnError, &OnStreamChanged, &OnNeedInputBuffer, &OnNewOutputBuffer}; int32_t ret = OH_VideoEncoder_RegisterCallback(videoEnc, cb, nullptr); // nullptr: userData is null. if (ret != AV_ERR_OK) { // Handle exceptions. }NOTE
In the callback functions, pay attention to multi-thread synchronization for operations on the data queue.
(Optional) Call OH_VideoEncoder_RegisterParameterCallback() to register the frame-specific parameter callback function.
For details, see Temporally Scalable Video Coding.
// 4.1 Implement the OH_VideoEncoder_OnNeedInputParameter callback function. static void OnNeedInputParameter(OH_AVCodec *codec, uint32_t index, OH_AVFormat *parameter, void *userData) { // The data parameter of the input frame and its index are sent to inQueue. inQueue.Enqueue(std::make_shared<CodecBufferInfo>(index, parameter)); } // 4.2 Register the frame-specific parameter callback function. OH_VideoEncoder_OnNeedInputParameter inParaCb = OnNeedInputParameter; OH_VideoEncoder_RegisterParameterCallback(videoEnc, inParaCb, nullptr); // nullptr: userData is null.Call OH_VideoEncoder_Configure() to configure the encoder.
For details about the configurable options, see Video Dedicated Key-Value Paris.
For details about the parameter verification rules, see OH_VideoEncoder_Configure().
The parameter value ranges can be obtained through the capability query interface. For details, see Obtaining Supported Codecs.
Currently, the following options must be configured for all supported formats: video frame width, video frame height, and video pixel format. In the code snippet below, the following variables are used:
- DEFAULT_WIDTH: 320 pixels
- DEFAULT_HEIGHT: 240 pixels
- DEFAULT_PIXELFORMAT: AV_PIXEL_FORMAT_NV12 (the pixel format of the YUV file is NV12)
// Configure the video frame rate. double frameRate = 30.0; // Configure the video YUV range flag. bool rangeFlag = false; // Configure the video primary color. int32_t primary = static_cast<int32_t>(OH_ColorPrimary::COLOR_PRIMARY_BT709); // Configure the transfer characteristics. int32_t transfer = static_cast<int32_t>(OH_TransferCharacteristic::TRANSFER_CHARACTERISTIC_BT709); // Configure the maximum matrix coefficient. int32_t matrix = static_cast<int32_t>(OH_MatrixCoefficient::MATRIX_COEFFICIENT_IDENTITY); // Configure the encoding profile. int32_t profile = static_cast<int32_t>(OH_AVCProfile::AVC_PROFILE_HIGH); // Configure the encoding bit rate mode. int32_t rateMode = static_cast<int32_t>(OH_BitrateMode::BITRATE_MODE_VBR); // Configure the key frame interval, in milliseconds. int32_t iFrameInterval = 1000; // Configure the bit rate, in bit/s. int64_t bitRate = 5000000; // Set the encoding quality. int64_t quality = 90; OH_AVFormat *format = OH_AVFormat_Create(); OH_AVFormat_SetIntValue (format, OH_MD_KEY_WIDTH, width); // Mandatory. OH_AVFormat_SetIntValue(format, OH_MD_KEY_HEIGHT, height); // Mandatory. OH_AVFormat_SetIntValue(format, OH_MD_KEY_PIXEL_FORMAT, pixelFormat); // Mandatory. OH_AVFormat_SetDoubleValue(format, OH_MD_KEY_FRAME_RATE, frameRate); OH_AVFormat_SetIntValue(format, OH_MD_KEY_RANGE_FLAG, rangeFlag); OH_AVFormat_SetIntValue(format, OH_MD_KEY_COLOR_PRIMARIES, primary); OH_AVFormat_SetIntValue(format, OH_MD_KEY_TRANSFER_CHARACTERISTICS, transfer); OH_AVFormat_SetIntValue(format, OH_MD_KEY_MATRIX_COEFFICIENTS, matrix); OH_AVFormat_SetIntValue(format, OH_MD_KEY_I_FRAME_INTERVAL, iFrameInterval); OH_AVFormat_SetIntValue(format, OH_MD_KEY_PROFILE, profile); // Configure OH_MD_KEY_QUALITY only when OH_BitrateMode = BITRATE_MODE_CQ is used. if (rateMode == static_cast<int32_t>(OH_BitrateMode::BITRATE_MODE_CQ)) { OH_AVFormat_SetIntValue(format, OH_MD_KEY_QUALITY, quality); } else if (rateMode == static_cast<int32_t>(OH_BitrateMode::BITRATE_MODE_CBR)|| rateMode == static_cast<int32_t>(OH_BitrateMode::BITRATE_MODE_VBR)){ OH_AVFormat_SetLongValue(format, OH_MD_KEY_BITRATE, bitRate); } OH_AVFormat_SetIntValue(format, OH_MD_KEY_VIDEO_ENCODE_BITRATE_MODE, rateMode); int32_t ret = OH_VideoEncoder_Configure(videoEnc, format); if (ret != AV_ERR_OK) { // Handle exceptions. } OH_AVFormat_Destroy(format);NOTE
If an optional parameter is incorrectly configured, the error code AV_ERR_INVAILD_VAL is returned. However, OH_VideoEncoder_Configure() does not fail. Instead, its execution continues with the default value.
Obtain a surface.
Obtain the OHNativeWindow in surface mode. The surface must be obtained before OH_VideoEncoder_Prepare is called.
// Obtain the surface used for data input. OHNativeWindow *nativeWindow; int32_t ret = OH_VideoEncoder_GetSurface(videoEnc, &nativeWindow); if (ret != AV_ERR_OK) { // Handle exceptions. } // Use the OHNativeWindow* variable to obtain the address of the data to be filled through the producer interface.For details about how to use the OHNativeWindow* variable-type, see OHNativeWindow.
Call OH_VideoEncoder_Prepare() to prepare internal resources for the encoder.
int32_t ret = OH_VideoEncoder_Prepare(videoEnc); if (ret != AV_ERR_OK) { // Handle exceptions. }Call OH_VideoEncoder_Start() to start the encoder.
// Configure the paths of the input and output files. std::string_view outputFilePath = "/*yourpath*.h264"; std::unique_ptr<std::ofstream> outputFile = std::make_unique<std::ofstream>(); outputFile->open(outputFilePath.data(), std::ios::out|std::ios::binary|std::ios::ate); // Start the encoder. int32_t ret = OH_VideoEncoder_Start(videoEnc); if (ret != AV_ERR_OK) { // Handle exceptions. }(Optional) Call OH_VideoEncoder_SetParameter() to dynamically configure encoder parameters during running.
OH_AVFormat *format = OH_AVFormat_Create(); // Dynamically request IDR frames. OH_AVFormat_SetIntValue(format, OH_MD_KEY_REQUEST_I_FRAME, true); int32_t ret = OH_VideoEncoder_SetParameter(videoEnc, format); if (ret != AV_ERR_OK) { // Handle exceptions. } OH_AVFormat_Destroy(format);Write the image to encode.
In step 6, you have configured the OHNativeWindow* variable type returned by OH_VideoEncoder_GetSurface. The data required for encoding is continuously input by the surface. Therefore, you do not need to process the OnNeedInputBuffer callback function or use OH_VideoEncoder_PushInputBuffer to input data.
(Optional) Call OH_VideoEncoder_PushInputParameter() to notify the encoder that the frame-specific parameter configuration is complete.
In step 4, you have registered the frame-specific parameter callback function.
In the code snippet below, the following variables are used:
- index: parameter passed by the callback function OnNeedInputParameter, which uniquely corresponds to the buffer.
std::shared_ptr<CodecBufferInfo> bufferInfo = inQueue.Dequeue(); std::shared_lock<std::shared_mutex> lock(codecMutex); if (bufferInfo == nullptr||!bufferInfo->isValid) { // Handle exceptions. } // You can determine the value. int32_t isIFrame; OH_AVFormat_SetIntValue(bufferInfo->parameter, OH_MD_KEY_REQUEST_I_FRAME, isIFrame); int32_t ret = OH_VideoEncoder_PushInputParameter(videoEnc, bufferInfo->index); if (ret != AV_ERR_OK) { // Handle exceptions. }Call OH_VideoEncoder_NotifyEndOfStream() to notify the encoder of EOS.
// In surface mode, you only need to call this API to notify the encoder of EOS. // In buffer mode, you need to set the AVCODEC_BUFFER_FLAGS_EOS flag and then call OH_VideoEncoder_PushInputBuffer to notify the encoder of EOS. int32_t ret = OH_VideoEncoder_NotifyEndOfStream(videoEnc); if (ret != AV_ERR_OK) { // Handle exceptions. }Call OH_VideoEncoder_FreeOutputBuffer() to release encoded frames.
In the code snippet below, the following variables are used:
- index: parameter passed by the callback function OnNewOutputBuffer, which uniquely corresponds to the buffer.
- buffer: parameter passed by the callback function OnNewOutputBuffer. You can obtain the pointer to the shared memory address by calling OH_AVBuffer_GetAddr.
std::shared_ptr<CodecBufferInfo> bufferInfo = outQueue.Dequeue(); std::shared_lock<std::shared_mutex> lock(codecMutex); if (bufferInfo == nullptr||!bufferInfo->isValid) { // Handle exceptions. } // Obtain the encoded information. OH_AVCodecBufferAttr info; int32_t ret = OH_AVBuffer_GetBufferAttr(bufferInfo->buffer, &info); if (ret != AV_ERR_OK) { // Handle exceptions. } // Write the encoded frame data (specified by buffer) to the output file. outputFile->write(reinterpret_cast<char *>(OH_AVBuffer_GetAddr(bufferInfo->buffer)), info.size); // Free the output buffer. index is the index of the buffer. ret = OH_VideoEncoder_FreeOutputBuffer(videoEnc, bufferInfo->index); if (ret != AV_ERR_OK) { // Handle exceptions. }(Optional) Call OH_VideoEncoder_Flush() to refresh the encoder.
After OH_VideoEncoder_Flush is called, the encoder remains in the Running state, but the input and output data and parameter set (such as the H.264 PPS/SPS) buffered in the encoder are cleared.
To continue encoding, you must call OH_VideoEncoder_Start again.
std::unique_lock<std::shared_mutex> lock(codecMutex); // Refresh the encoder. int32_t ret = OH_VideoEncoder_Flush(videoEnc); if (ret != AV_ERR_OK) { // Handle exceptions. } inQueue.Flush(); outQueue.Flush(); // Start encoding again. ret = OH_VideoEncoder_Start(videoEnc); if (ret != AV_ERR_OK) { // Handle exceptions. }(Optional) Call OH_VideoEncoder_Reset() to reset the encoder.
After OH_VideoEncoder_Reset is called, the encoder returns to the Initialized state. To continue, you must call OH_VideoEncoder_Configure and OH_VideoEncoder_Prepare again.
std::unique_lock<std::shared_mutex> lock(codecMutex); // Reset the encoder. int32_t ret = OH_VideoEncoder_Reset(videoEnc); if (ret != AV_ERR_OK) { // Handle exceptions. } inQueue.Flush(); outQueue.Flush(); // Reconfigure the encoder. OH_AVFormat *format = OH_AVFormat_Create(); ret = OH_VideoEncoder_Configure(videoEnc, format); if (ret != AV_ERR_OK) { // Handle exceptions. } OH_AVFormat_Destroy(format); // The encoder is ready again. ret = OH_VideoEncoder_Prepare(videoEnc); if (ret != AV_ERR_OK) { // Handle exceptions. }(Optional) Call OH_VideoEncoder_Stop() to stop the encoder.
After OH_VideoEncoder_Stop is called, the encoder retains the encoding instance and releases the input and output buffers. You can directly call OH_VideoEncoder_Start to continue encoding. The first buffer passed must carry the parameter set, starting from the IDR frame.
std::unique_lock<std::shared_mutex> lock(codecMutex); // Stop the encoder. int32_t ret = OH_VideoEncoder_Stop(videoEnc); if (ret != AV_ERR_OK) { // Handle exceptions. } inQueue.Flush(); outQueue.Flush();Call OH_VideoEncoder_Destroy() to destroy the encoder instance and release resources.
NOTE
This API cannot be called in the callback function.
After the call, you must set a null pointer to the encoder to prevent program errors caused by wild pointers.
std::unique_lock<std::shared_mutex> lock(codecMutex); // Release the nativeWindow instance. if(nativeWindow != nullptr){ OH_NativeWindow_DestroyNativeWindow(nativeWindow); nativeWindow = nullptr; } // Call OH_VideoEncoder_Destroy to destroy the encoder. int32_t ret = AV_ERR_OK; if (videoEnc != nullptr) { ret = OH_VideoEncoder_Destroy(videoEnc); videoEnc = nullptr; } if (ret != AV_ERR_OK) { // Handle exceptions. } inQueue.Flush(); outQueue.Flush();
Buffer Input
The following walks you through how to implement the entire video encoding process in buffer mode. It uses the YUV file input and H.264 encoding format as an example. Currently, the VideoEncoder module supports only data rotation in asynchronous mode.
Add the header files.
#include <multimedia/player_framework/native_avcodec_videoencoder.h> #include <multimedia/player_framework/native_avcapability.h> #include <multimedia/player_framework/native_avcodec_base.h> #include <multimedia/player_framework/native_avformat.h> #include <multimedia/player_framework/native_avbuffer.h> #include <fstream>Create an encoder instance.
The procedure is the same as that in surface mode and is not described here.
// Create an encoder by name. If your application has special requirements, for example, expecting an encoder that supports a certain resolution, you can call OH_AVCodec_GetCapability to query the capability first. OH_AVCapability *capability = OH_AVCodec_GetCapability(OH_AVCODEC_MIMETYPE_VIDEO_AVC, true); const char *codecName = OH_AVCapability_GetName(capability); OH_AVCodec *videoEnc = OH_VideoEncoder_CreateByName(codecName);// Create an encoder by MIME type. Only specific codecs recommended by the system can be created in this way. // If multiple codecs need to be created, create hardware encoder instances first. If the hardware resources are insufficient, create software encoder instances. OH_AVCodec *videoEnc = OH_VideoEncoder_CreateByMime(OH_AVCODEC_MIMETYPE_VIDEO_AVC);Call OH_VideoEncoder_RegisterCallback() to register the callback functions.
Register the OH_AVCodecCallback struct that defines the following callback function pointers:
- OH_AVCodecOnError, a callback used to report a codec operation error. For details about the error codes, see OH_AVCodecOnError.
- OH_AVCodecOnStreamChanged, a callback used to report a codec stream change, for example, format change.
- OH_AVCodecOnNeedInputBuffer, a callback used to report input data required, which means that the encoder is ready for receiving YUV/RGB data.
- OH_AVCodecOnNewOutputBuffer, a callback used to report output data generated, which means that encoding is complete.
You need to process the callback functions to ensure that the encoder runs properly.
bool isFirstFrame = true;// Implement the OH_AVCodecOnError callback function. static void OnError(OH_AVCodec *codec, int32_t errorCode, void *userData) { // Process the error code in the callback. (void)codec; (void)errorCode; (void)userData; }// Implement the OH_AVCodecOnStreamChanged callback function. static void OnStreamChanged(OH_AVCodec *codec, OH_AVFormat *format, void *userData) { // In buffer mode, this callback function does not take effect. (void)codec; (void)format; (void)userData; }// Implement the OH_AVCodecOnNeedInputBuffer callback function. static void OnNeedInputBuffer(OH_AVCodec *codec, uint32_t index, OH_AVBuffer *buffer, void *userData) { // Obtain the video width stride and height stride. if (isFirstFrame) { OH_AVFormat *format = OH_VideoEncoder_GetInputDescription(codec); OH_AVFormat_GetIntValue(format, OH_MD_KEY_VIDEO_STRIDE, &widthStride); OH_AVFormat_GetIntValue(format, OH_MD_KEY_VIDEO_SLICE_HEIGHT, &heightStride); OH_AVFormat_Destroy(format); isFirstFrame = false; } // The data buffer of the input frame and its index are sent to inQueue. (void)codec; (void)userData; inQueue.Enqueue(std::make_shared<CodecBufferInfo>(index, buffer)); }// Implement the OH_AVCodecOnNewOutputBuffer callback function. static void OnNewOutputBuffer(OH_AVCodec *codec, uint32_t index, OH_AVBuffer *buffer, void *userData) { // The data buffer of the finished frame and its index are sent to outQueue. (void)userData; outQueue.Enqueue(std::make_shared<CodecBufferInfo>(index, buffer)); }// Call OH_VideoEncoder_RegisterCallback() to register the callback functions. OH_AVCodecCallback cb = {&OnError, &OnStreamChanged, &OnNeedInputBuffer, &OnNewOutputBuffer}; int32_t ret = OH_VideoEncoder_RegisterCallback(videoEnc, cb, nullptr); if (ret != AV_ERR_OK) { // Handle exceptions. }NOTE
In the callback functions, pay attention to multi-thread synchronization for operations on the data queue.
Call OH_VideoEncoder_Configure() to configure the encoder.
The procedure is the same as that in surface mode and is not described here.
OH_AVFormat *format = OH_AVFormat_Create(); // Set the format. OH_AVFormat_SetIntValue (format, OH_MD_KEY_WIDTH, width); // Mandatory. OH_AVFormat_SetIntValue(format, OH_MD_KEY_HEIGHT, height); // Mandatory. OH_AVFormat_SetIntValue(format, OH_MD_KEY_PIXEL_FORMAT, pixelFormat); // Mandatory. // Configure the encoder. int32_t ret = OH_VideoEncoder_Configure(videoEnc, format); if (ret != AV_ERR_OK) { // Handle exceptions. } OH_AVFormat_Destroy(format);Call OH_VideoEncoder_Prepare() to prepare internal resources for the encoder.
ret = OH_VideoEncoder_Prepare(videoEnc); if (ret != AV_ERR_OK) { // Handle exceptions. }Call OH_VideoEncoder_Start() to start the encoder.
As soon as the encoder starts, the callback functions will be triggered to respond to events. Therefore, you must configure the input file and output file first.
// Configure the paths of the input and output files. std::string_view inputFilePath = "/*yourpath*.yuv"; std::string_view outputFilePath = "/*yourpath*.h264"; std::unique_ptr<std::ifstream> inputFile = std::make_unique<std::ifstream>(); std::unique_ptr<std::ofstream> outputFile = std::make_unique<std::ofstream>(); inputFile->open(inputFilePath.data(), std::ios::in|std::ios::binary); outputFile->open(outputFilePath.data(), std::ios::out|std::ios::binary|std::ios::ate); // Start the encoder. int32_t ret = OH_VideoEncoder_Start(videoEnc); if (ret != AV_ERR_OK) { // Handle exceptions. }(Optional) Dynamically configure encoder parameters during running.
c++
OH_AVFormat *format = OH_AVFormat_Create();
// Dynamically request IDR frames.
OH_AVFormat_SetIntValue(format, OH_MD_KEY_REQUEST_I_FRAME, true);
int32_t ret = OH_VideoEncoder_SetParameter(videoEnc, format);
if (ret != AV_ERR_OK) {
// Handle exceptions.
}
OH_AVFormat_Destroy(format);
Call OH_VideoEncoder_PushInputBuffer() to push the image to the input queue for encoding.
In the code snippet below, the following variables are used:
- buffer: parameter passed by the callback function OnNeedInputBuffer. You can obtain the pointer to the shared memory address by calling OH_AVBuffer_GetAddr.
- index: parameter passed by the callback function OnNeedInputBuffer, which uniquely corresponds to the buffer.
- widthStride: stride of the obtained buffer data.
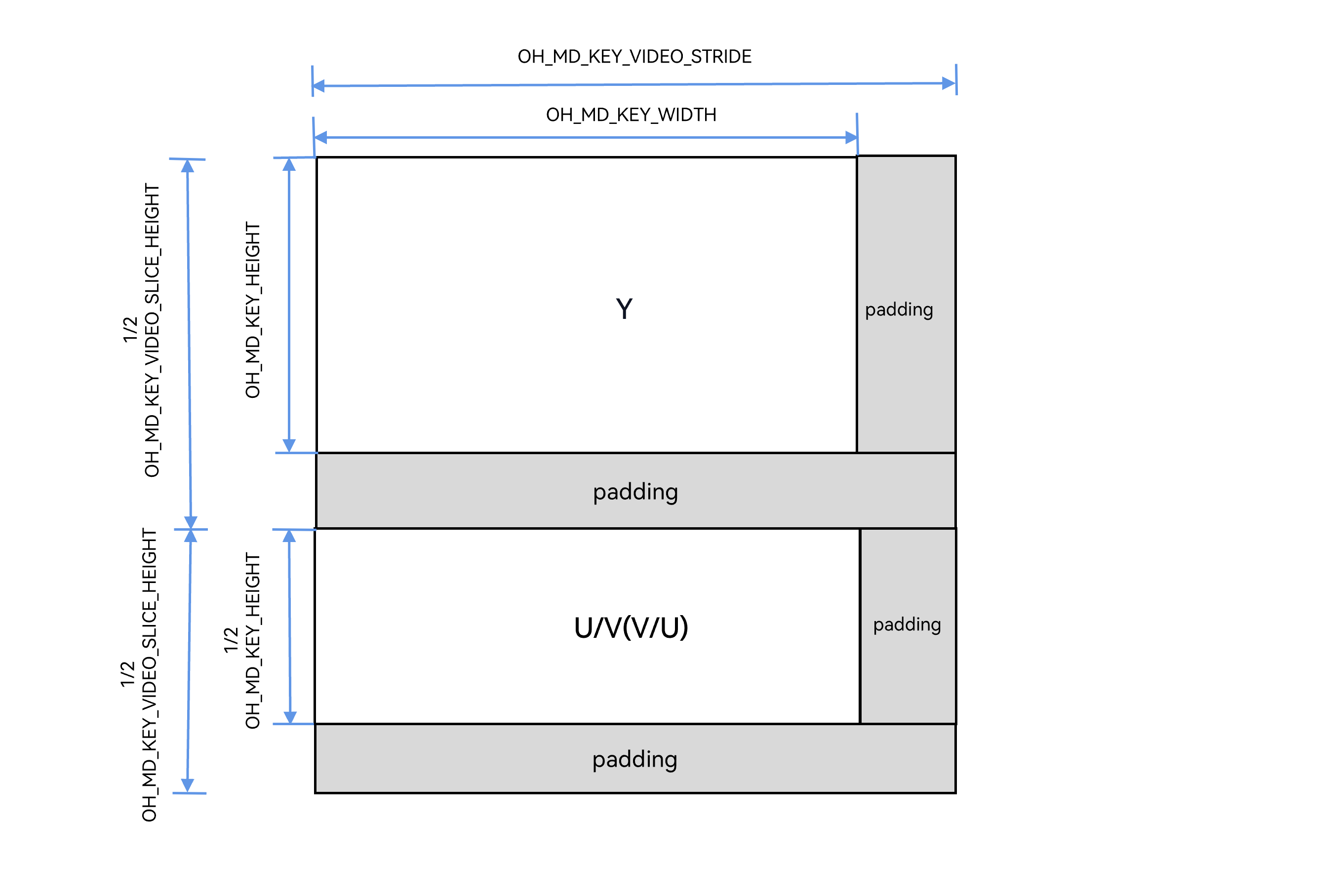
std::shared_ptr<CodecBufferInfo> bufferInfo = inQueue.Dequeue(); std::shared_lock<std::shared_mutex> lock(codecMutex); if (bufferInfo == nullptr||!bufferInfo->isValid) { // Handle exceptions. } // Write image data. if (widthStride == width) { // Process the file stream and obtain the frame length, and then write the data to encode to the buffer of the specified index. int32_t frameSize = width * height * 3 / 2; // Formula for calculating the data size of each frame in NV12 pixel format. inputFile->read(reinterpret_cast<char *>(OH_AVBuffer_GetAddr(bufferInfo->buffer)), frameSize); } else { // If the stride is not equal to the width, perform offset based on the stride. For details, see the following example. } // Configure the buffer information. OH_AVCodecBufferAttr info; info.size = frameSize; info.offset = 0; info.pts = 0; int32_t ret = OH_AVBuffer_SetBufferAttr(bufferInfo->buffer, &info); if (ret != AV_ERR_OK) { // Handle exceptions. } // Configure the buffer frame-specific information. // You can determine the value. int32_t isIFrame; OH_AVFormat *parameter = OH_AVBuffer_GetParameter(bufferInfo->buffer); OH_AVFormat_SetIntValue(parameter, OH_MD_KEY_REQUEST_I_FRAME, isIFrame); ret = OH_AVBuffer_SetParameter(bufferInfo->buffer, parameter); if (ret != AV_ERR_OK) { // Handle exceptions. } OH_AVFormat_Destroy(parameter); // Send the data to the input buffer for encoding. index is the index of the buffer. ret = OH_VideoEncoder_PushInputBuffer(videoEnc, bufferInfo->index); if (ret != AV_ERR_OK) { // Handle exceptions. }Offset the stride. The following uses an NV12 image as an example, presenting the image layout of width, height, wStride, and hStride.
- OH_MD_KEY_WIDTH corresponds to width.
- OH_MD_KEY_HEIGHT corresponds to height.
- OH_MD_KEY_VIDEO_STRIDE corresponds to wStride.
- OH_MD_KEY_VIDEO_SLICE_HEIGHT corresponds to hStride.
Add the header file.
#include <string.h>The following is the sample code:
struct Rect // Width and height of the source buffer. You can set them as required. { int32_t width; int32_t height; }; struct DstRect // Width stride and height stride of the destination buffer. They are obtained by calling OH_VideoEncoder_GetInputDescription. { int32_t wStride; int32_t hStride; }; struct SrcRect // Width stride and height stride of the source buffer. You can set them as required. { int32_t wStride; int32_t hStride; }; Rect rect = {320, 240}; DstRect dstRect = {320, 256}; SrcRect srcRect = {320, 250}; uint8_t* dst = new uint8_t[dstRect.hStride * dstRect.wStride * 3 / 2]; // Pointer to the target memory area. uint8_t* src = new uint8_t[srcRect.hStride * srcRect.wStride * 3 / 2]; // Pointer to the source memory area. uint8_t* dstTemp = dst; uint8_t* srcTemp = src; // Y: Copy the source data in the Y region to the target data in another region. for (int32_t i = 0; i < rect.height; ++i) { // Copy a row of data from the source to a row of the target. memcpy(dstTemp, srcTemp, rect.width); // Update the pointers to the source data and target data to copy the next row. The pointers to the source data and target data are moved downwards by one wStride each time the source data and target data are updated. dstTemp += dstRect.wStride; srcTemp += srcRect.wStride; } // Padding. // Update the pointers to the source data and target data. The pointers move downwards by one padding. dstTemp += (dstRect.hStride - rect.height) * dstRect.wStride; srcTemp += (srcRect.hStride - rect.height) * srcRect.wStride; rect.height >>= 1; // UV: Copy the source data in the UV region to the target data in another region. for (int32_t i = 0; i < rect.height; ++i) { memcpy(dstTemp, srcTemp, rect.width); dstTemp += dstRect.wStride; srcTemp += srcRect.wStride; } delete[] dst; dst = nullptr; delete[] src; src = nullptr;When processing buffer data (before pushing data) during hardware encoding, you must copy the image data after width and height alignment to the input callback AVBuffer. Generally, copy the image width, height, stride, and pixel format to ensure correct processing of the data to encode. For details, see step 3 in Buffer Input.
Notify the encoder of EOS.
In the code snippet below, the following variables are used:
- index: parameter passed by the callback function OnNeedInputBuffer, which uniquely corresponds to the buffer.
- buffer: parameter passed by the callback function OnNeedInputBuffer. You can obtain the pointer to the shared memory address by calling OH_AVBuffer_GetAddr.
The API OH_VideoEncoder_PushInputBuffer is used to notify the encoder of EOS. This API is also used in step 8 to push the stream to the input queue for encoding. Therefore, in the current step, you must pass in the AVCODEC_BUFFER_FLAGS_EOS flag.
std::shared_ptr<CodecBufferInfo> bufferInfo = inQueue.Dequeue(); std::shared_lock<std::shared_mutex> lock(codecMutex); if (bufferInfo == nullptr||!bufferInfo->isValid) { // Handle exceptions. } OH_AVCodecBufferAttr info; info.size = 0; info.offset = 0; info.pts = 0; info.flags = AVCODEC_BUFFER_FLAGS_EOS; int32_t ret = OH_AVBuffer_SetBufferAttr(bufferInfo->buffer, &info); if (ret != AV_ERR_OK) { // Handle exceptions. } ret = OH_VideoEncoder_PushInputBuffer(videoEnc, bufferInfo->index); if (ret != AV_ERR_OK) { // Handle exceptions. }Call OH_VideoEncoder_FreeOutputBuffer() to release encoded frames.
The procedure is the same as that in surface mode and is not described here.
std::shared_ptr<CodecBufferInfo> bufferInfo = outQueue.Dequeue(); std::shared_lock<std::shared_mutex> lock(codecMutex); if (bufferInfo == nullptr||!bufferInfo->isValid) { // Handle exceptions. } // Obtain the encoded information. OH_AVCodecBufferAttr info; int32_t ret = OH_AVBuffer_GetBufferAttr(bufferInfo->buffer, &info); if (ret != AV_ERR_OK) { // Handle exceptions. } // Write the encoded frame data (specified by buffer) to the output file. outputFile->write(reinterpret_cast<char *>(OH_AVBuffer_GetAddr(bufferInfo->buffer)), info.size); // Free the output buffer. index is the index of the buffer. ret = OH_VideoEncoder_FreeOutputBuffer(videoEnc, bufferInfo->index); if (ret != AV_ERR_OK) { // Handle exceptions. }
The subsequent processes (including refreshing, resetting, stopping, and destroying the encoder) are the same as those in surface mode. For details, see steps 14–17 in Surface Input.
你可能感兴趣的鸿蒙文章
harmony 鸿蒙Media Data Demultiplexing
harmony 鸿蒙Media Data Multiplexing
harmony 鸿蒙Introduction to AVCodec Kit
harmony 鸿蒙AVCodec Supported Formats
harmony 鸿蒙Obtaining Supported Codecs
harmony 鸿蒙Concurrently Creating a Video Decoder and Initializing NativeWindow
- 所属分类: 后端技术
- 本文标签:
热门推荐
-
2、 优质文章
-
3、 gt
-
7、 openharmony
-
9、 golang
-
10、 Vue中input框自动聚焦